/*
Arduino Servo
*/
#include
Servo servoMain; // Обьект Servo
void setup()
{
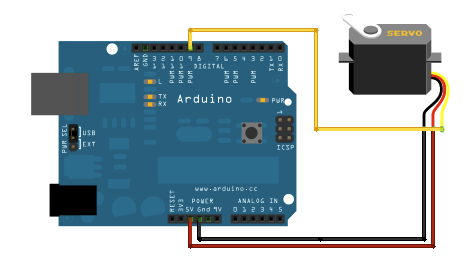
servoMain.attach(9); // Servo присоединен к 9 выводу
}
void loop()
{
servoMain.write(45); // Повернуть серво влево на 45 градусов
delay(2000); // Пауза 2 сек.
servoMain.write(0); // Повернуть серво влево на 0 градусов
delay(1000); // Пауза 1 сек.
servoMain.write(90); // Повернуть серво на 90 градусов. Центральная позиция
delay(1500); // Пауза 1.5 сек.
servoMain.write(135); // Повернуть серво вправо на 135 градусов
delay(3000); // Пауза 3 сек.
servoMain.write(180); // Повернуть серво вправо на 180 градусов
delay(1000); // Пауза 1 сек.
servoMain.write(90); // Повернуть серво на 90 градусов. Центральная позиция
delay(5000); // Пауза 5 сек.
}
|