Драйвер мотора L298 для робота |
Твердо решил заняться строительством робота. Сначала взял за основу робот компании Asuro. Приобрел шнурок для программирования микроконтроллера ATMEGA8, задействованном в роботе ASURO, но дальше дело застопорилось. Понял, что этот путь не для меня, уж очень в роботе Asuro все предопределено. Да, хлопот меньше, но это путь тупиковый, дальше развиваться некуда. …и я ушел к другой (А. Райкин). Выбрал тележку для СВОЕГО робота – Mr/ Basic. Моторы-редукторы уже в комплекте, но управление моторами отсутствует.
Пришлось вплотную заняться этой темой. Подумав, что эта тема будет интересна и другим строителям роботов, решил рассказать о применение драйвера моторов L298 подробнее. Драйвер L298 предназначен для управления шаговыми двигателями. В паре с микросхемой L297, драйвер L298 обеспечивает полноценное управление шаговым двигателем. Но конструкция L298 предполагает возможность управления двумя моторами постоянного тока.
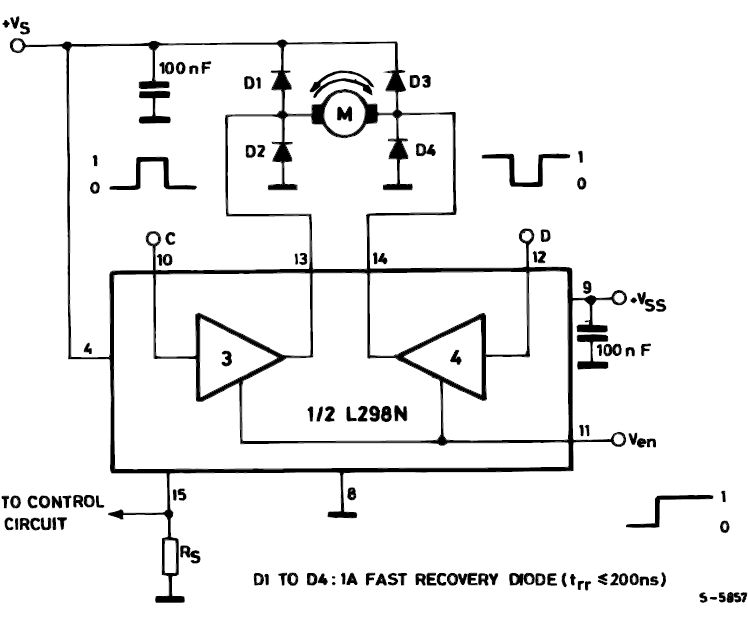
Это упрощенная схем 1/2 драйвера L298, но для понимания принципа работы драйвера этого достаточно. Схема драйвера состоит их двух частей – управляющей и силовой. Напряжение питания управляющей части драйвера подается на вывод 9 (+Vss) и может достигать 7 вольт. Если микроконтроллер системы управления роботом питается от +5 вольт, то такое же напряжение подадим на вывод 9. В этом случае уровни сигналов управления микроконтроллера и драйвера будут согласованы. Силовая часть драйвера L298 получает питание через вывод 4 (+Vs) и может достигать +36 вольт. В нашем случае оно должно быть равно напряжению питания моторов плюс 1 вольт. Запас в +1 вольт необходим для того, чтобы двигатель нормально “кормился” от силовой части драйвера. Примерно 1 вольт останется на силовых ключах драйвера, при токе через мотор около 1 А. Об этом нужно помнить, если не хотите, чтобы ваш робот “ползал”, а не бегал.
Наличие защитных диодов D1-D4 обязательно, в противном случае драйвер “сгорит”. Энергия удержания, накопленная в индуктивности обмотки мотора, обязательно уничтожит силовые ключи драйвера L298. Причем защитные диоды нужно применять не абы какие, а скоростные и сильноточные. Ток защитных диодов не менее 1 А, время рассасывание неосновных носителей не более 200 nS. Не заморачивайтесь, диоды 1N5818 вполне подойдут. Не забудьте о фильтрах для сглаживания пульсаций на входах +Vss и +Vs. Многие интересуются, что делать с выводами 1 (sensA) и 15 (sensB) драйвера L298. Если не планируете измерять или ограничивать ток через моторы, то эти выводы присоединяем к минусу Vs (к “земле”).
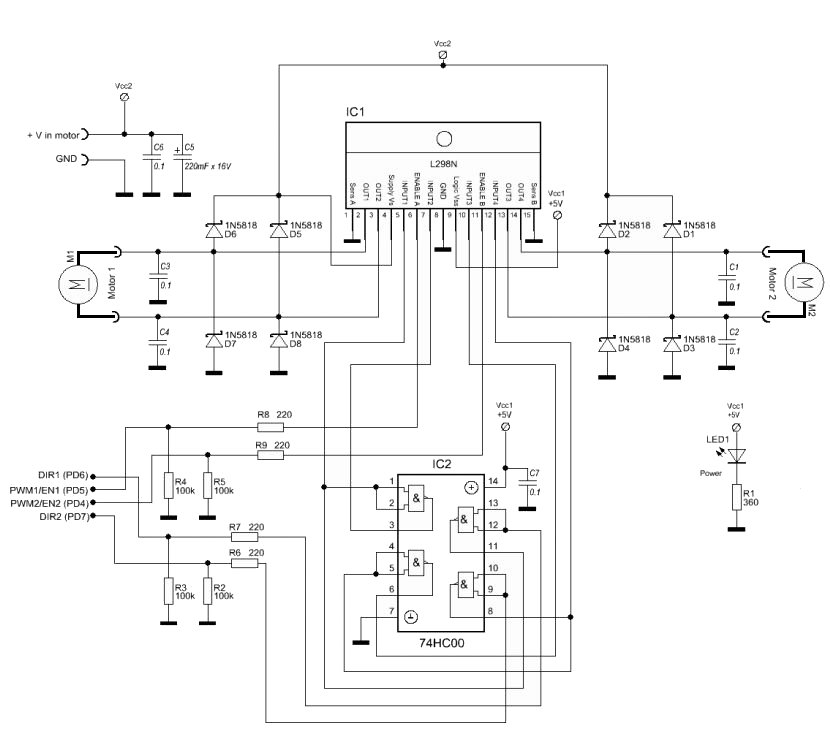
Рабочая схема драйвера моторов L298N для робота с управлением от микроконтроллера
К драйверу L298N можно подключить два мотора, ток через каждый мотор не более 1 А, кратковременно до 1.6 А. Этого должно хватить для полноценного питания двух моторов робота. Для каждого мотора – два входа управления. На вход DIR подаем логические “0″ или “1″ от микроконтроллера. Сигнал от микроконтроллера на этом входе задает направление вращения мотора. Вход PWM: при логическом “0″ на входе мотор стоит, при логической “1″ на входе PWM мотор вращается. При изменяемой скважности сигнала на входе PWM, появляется возможность изменять скорость вращения мотора. Сигнал логического “0″ – это сигнал с напряжением меньше 1 вольта. Сигнал логической “1″ – напряжение выше 2.5 вольт. Фактически сигнал PWM подается на вход разрешения (Ven) работы силовой части драйвера. Микросхема 74HC00 применена для повышения помехоустойчивости драйвера L298.
| C этой схемой также часто просматривают: |
 ЗАЖИГАЛКА ДЛЯ ГАЗА ЗАЖИГАЛКА ДЛЯ ГАЗА
Зарядное устройство для автомобильных и мотоциклетных батарей
Зарядное устройство для автомобильных аккумуляторов
Имитатор для проверки телефонных аппаратов
Простые датчики для охранной сигнализации
Простая отладочная плата для микроконтроллеров PIC
Стабилизаторы напряжения на микросхеме ВА6220
Выключатель для настольной лампы
Усилитель ЗЧ с низким напряжением питания
|  |
Переключатели на микроконтроллере Делитель частоты с регулируемым коэффициентом деления Устройства на микросхеме MAX869L Генератор пилообразного напряжения на таймере 555 LC-мультивибратор 60 Гц от часового резонатора Простой синхронный умножитель частоты Триггер на транзисторной оптопаре 4N35 «Триггерная кнопка» на микросхеме CD4069 Простой приёмник ИК дистанционного управления |
