|
Робот назван «пограничным», поскольку может перемещаться не по тёмной (или светлой) линии, нарисованной на ровной поверхности, а вдоль границы между светлым и тёмным фоном. Его отличительные особенности — отсутствие в узле управления микросхем и всего один электродвигатель.
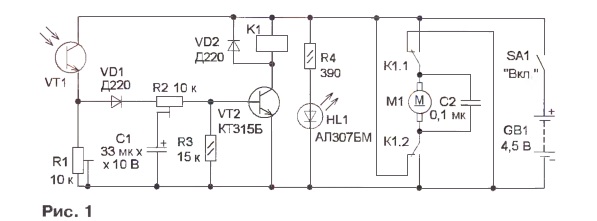
При разработке робота ставилась задача применить в его конструкции доступные элементы и минимизировать их число. Его схема показана на рис. 1. Чувствительным элементом — датчиком, который реагирует на интенсивность отражённого от подстилающей поверхности света, служит фототранзистор VT1. Когда он находится над тёмной поверхностью, на него падает мало света, ток через него мал и транзистор VT2 закрыт. Вал электродвигателя М1 при этом вращается в одном направлении и робот смещается в сторону светлой поверхности. Когда датчик окажется на ней, ток через фототранзистор VT1 и транзистор VT2 увеличится и реле К1 сработает.
Своими контактами К1.1 и К1.2 оно изменит полярность питающего электродвигатель напряжения, и робот станет смещаться в обратном направлении, т. е. в сторону тёмной поверхности. Далее цикл повторится, тем самым обеспечивая перемещение робота вперёд рыскающими движениями.
Цепь C1R2 создаёт небольшую задержку срабатывания реле К1, и поэтому подстроечным резистором R2 можно изменять угол рыскания, регулируя тем самым амплитуду отклонения датчика в интервале от нескольких миллиметров до 2,5 см от границы между тёмной и светлой поверхностями во время движения робота. Диод VD1 предотвращает разрядку конденсатора С1 через резистор R1, которым устанавливают чувствительность датчика.
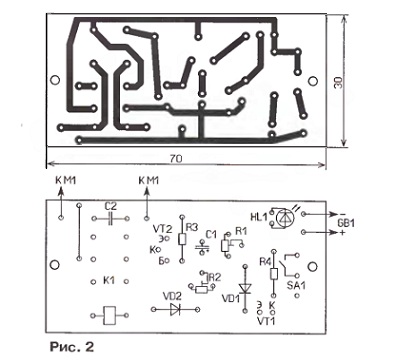
В устройстве можно применить постоянные резисторы МЛТ, С2-23, подстроечные — любые малогабаритные маломощные, оксидный конденсатор — импортный, С2 — КМ, К10-17. Транзитор — любой маломощный структуры n-p-n с допустимым током коллектора не менее 100 мА и коэффициентом передачи тока базы h213 не менее 100. Диоды Д220 можно заменить любыми из серий КД103, КД503, КД521, КД522. Выключатель питания движковый — ПД9 или любой малогабаритный. Реле — DS2E-S-DC5V фирмы Matsushita с номинальным напряжением 5 В (его предварительно надо проверить на надёжное срабатывание при напряжении 4 В). Но более надёжно будет работать реле DS2E-S-DC3V. Подойдут также реле BT-5S. В конструкции можно применить любые двигатели с рабочим напряжением от 3…9 В от привода DVD-дисковода. Фототранзистор — от компьютерной «мыши” или FDD. Большинство элементов установлено на макетной печатной плате размерами 30×70 мм с применением проводного монтажа. Но можно изготовить одностороннюю плату из стеклотекстолита толщиной 1,5 мм, её чертёж показан на рис. 2. Она рассчитана на установку подстроечных резисторов СПЗ-19.
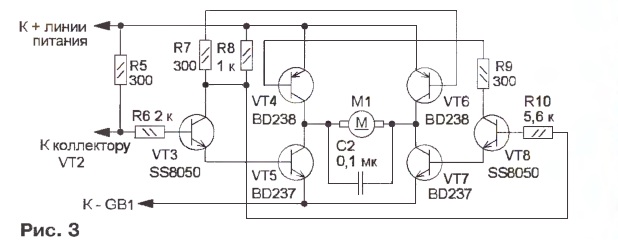
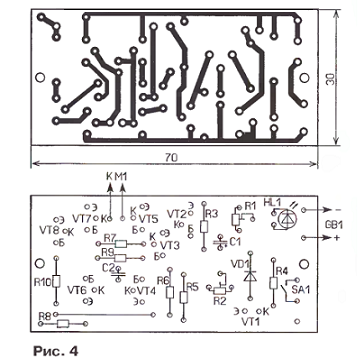
При отсутствии малогабаритного реле с требуемым номинальным напряжением его можно заменить транзисторным усилителем мощности с дифференциальным выходом, схема которого показана на рис. 3. Нумерация его элементов продолжена, а плата потребует соответствующей корректировки (рис. 4). При этом взамен реле устанавливают резистор сопротивлением 300 Ом (R5), диод VD2 исключают из схемы. В зависимости от полярности подключения электродвигателя робот будет двигаться по трассе в одну или другую сторону. При ошибочной исходной ориентации робота на трассе он сам развернётся и начнёт движение по траектории в верном направлении.
Внешний вид робота показан на рис. 5. Он состоит из платформы 4 размерами 65×70 мм, изготовленной из листовой пластмассы толщиной 2,5 мм. К ней на верхней стороне с помощью винтов крепят батарейный отсек 2, а на двух стойках 5 (одну из них не видно) — печатную плату 1. К нижней стороне прикреплены пластмассовое (толщиной 2,5 мм ) основание 6 с электродвигателем и редуктором, держатели опорных колёс и штанга 3 с фототранзистором.

Размещение основных узлов на нижней стороне платформы показано на рис. 6. К ней с помощью уголка 8 из жести крепят основание 9 с электродвигателем и редуктором. Опорные колёса 1 (применены шестерни диаметром 43 мм от кассетного видеомагнитофона) надеты на металлическую ось 5 длиной 110 и диаметром 2,8 мм. Они должны свободно, но без люфта, вращаться на оси. Чтобы исключить смещение колёс, с двух сторон от них на ось надеты металлические шайбы 3 и отрезки 2 эластичной трубки длиной 4 и диаметром 3,5 мм (изоляция шнура компьютерной мыши). Саму ось закрепляют на платформе с помощью опор 4, изготовленных из канцелярских скрепок. От продольного скольжения в опорах ось сдерживают надетые на неё отрезки эластичной трубки 7 длиной несколько миллиметров.
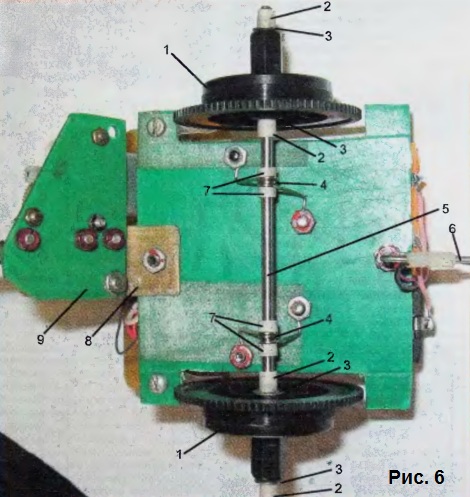
Штангу 6 длиной 60…70 мм (изготовлена из скрепки) крепят к платформе винтом. Фототранзистор закреплён на отрезке платы (см. рис. 5). Сам отрезок припаян к спирали из скрепки. В эту спираль туго вставлен отрезок упомянутой резиновой трубки длиной 12 мм, в которую вставляют штангу. Фототранзистор должен быть расположен на высоте около 10 мм от поверхности чувствительной стороной к ней. Такая конструкция позволяет дополнительно изменять амплитуду рысканий робота, перемещая и поворачивая датчик на штанге.
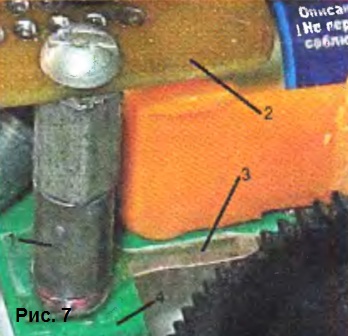
Опорные колёса должны вращаться независимо друг от друга и только в одном направлении (вперёд), иначе робот будет «ёрзать» на месте. Для обеспечения такого движения предназначены два стопора, вырезанных из пластмассы от пластиковой бутылки, по одному на каждое колесо. На рис. 7 показан один из них (3), он закреплён на платформе 4 с помощью стойки 1, на которой установлена печатная плата 2.
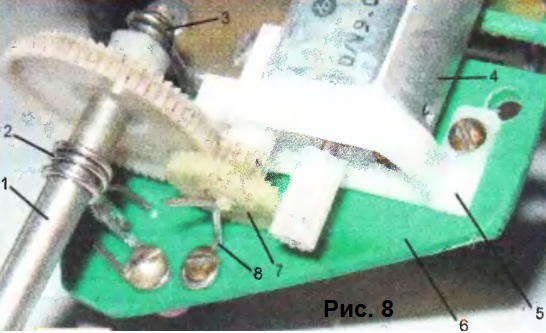
Конструкцию двигателя с редуктором поясняет рис. 8. К пластмассовому основанию 6 с помощью винтов крепят редуктор 5 с двигателем 4. Скоба 8 изготовлена из металлической канцелярской скрепки. Она не даёт промежуточной шестерёнке 7 соскальзывать со своей оси. Вал 1 (металлический стержень длиной 48 и диаметром 4 мм с канавкой на конце взят из ЛПМ катушечного магнитофона) крепится с помощью подшипников скольжения в виде спирали 2 и кольца 3, изготовленных также из скрепок. Резиновая насадка (от DVD-привода) длиной 8 и диаметром 7 мм установлена на другом конце вала (см. рис. 5).
Налаживание проводят в следующей последовательности. Двигатель временно отключают, робот на высоте 1 м) белый лист бумаги и рядом с датчиком кладут лист бумаги чёрного цвета. Подают питающее напряжение и медленно поворачивают робот так, чтобы датчик пересекал край чёрного листа. Резистор R1 устанавливают в положение, при котором реле будет устойчиво срабатывать (щёлкать). Затем подключают двигатель. После включения робот поворачивается на месте. Если разместить под датчиком край чёрной бумаги, робот должен начать движение вдоль него. Медленно перемещая этот лист, заставляют робот «идти» вслед за ним. При этом наблюдают за амплитудой колебаний датчика и резистором R2 устанавливают её в интервале 10…20 мм.
Полигон для испытаний робота можно изготовить из фанеры толщиной несколько миллиметров и размерами около 70×70 см. «Дорогу» можно нарисовать на белом фоне и в виде непрерывной чёрной замкнутой линии шириной 40…50 мм. При этом, в зависимости от внешней или внутренней границы, робот будет двигаться вдоль неё по часовой стрелке или против.
Перебуликация: www.diyelectronics.ru
Источник: Радио №01 2013г.
Автор: Д. МАМИЧЕВ, п. Шаталово Смоленской обл.
| C этой схемой также часто просматривают: |
 Робот «Пилигрим» своими руками Робот «Пилигрим» своими руками
Миллиомметр. Приставка к цифровому мультиметру
Индикатор стереобаланса
Переходник для подключения к USB-порту устройства с большим потребляемым током
Электронное светодиодное сердце на микроконтроллере
|  |
Двухкомандное дистанционное радиоуправление Реле времени для электромеханических игрушек «Цифровой» передатчик повышенной мощности Робот «Пилигрим» своими руками ДИСКРЕТНО-ПРОПОРЦИОНАЛЬНОЕ УПРАВЛЕНИЕ АППАРАТУРА ПРОПОРЦИОНАЛЬНОГО УПРАВЛЕНИЯ ПЕРЕДАТЧИК ДЛЯ ТЕЛЕУПРАВЛЕНИЯ Многокомандная система телеуправления ДЕСЯТЬ КОМАНД ПО ДВУМ ПРОВОДАМ Дешифратор простой системы телеуправления |
