Робот «Пилигрим» своими руками |
Эта игрушка является модернизированным вариантом «пограничного» робота и имеет более широкие возможности. Сущность модернизации — периодическое принудительное изменение полярности питающего напряжения электродвигателя, что изменяет направление движения робота на противоположное.
Например, если он начал перемещаться вдоль одной границы тёмной линии по часовой стрелке, через некоторое время произойдёт переключение полярности двигателя и он станет двигаться в том же направлении, но по другой границе. Следующее переключение приведёт к тому, что робот развернётся на 180° и станет перемещаться по той же границе, но уже против часовой стрелки. Если «путеводная» линия имеет много ответвлений, робот будет двигаться по разным маршрутам и в разных направлениях. Кроме того, он снабжён «ночным зрением» — автоматически включающейся подсветкой, что позволяет не сбиваться с пути при слабом внешнем освещении или при его отсутствии.
Конструкция робота
Схема доработки релейного варианта робота показана на рис. 1 (нумерация элементов продолжает нумерацию элементов схемы на рис. 1 и рис. 3 указанной выше статьи). На микросхеме DD1, транзисторе VT9 и реле К2 собран таймер переключения полярности питающего напряжения двигателя М1. Эта микросхема — многоразрядный счётчик с логическими элементами для построения генератора. Частоту генератора задают элементы R11, С4. Период переключения полярности — около 15 с. Светодиод HL2 — индикаторный, он включён, когда на реле К2 подано питающее напряжение. Конденсатор СЗ сглаживает пульсации питающего напряжения.
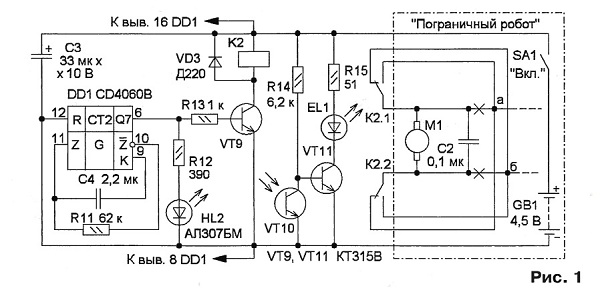
«Ночное зрение» роботу обеспечивает светодиод белого цвета свечения EL1. Его работой управляет датчик освещения — фототранзистор VT10 и транзистор VT11. При освещении лампой накаливания («день») полигона, по которому перемещается робот, фототранзистор VT10 открыт, а транзистор VT11 закрыт и светодиод EL1 выключен. Если освещение выключить («ночь»), сопротивление фототранзистора увеличится, напряжение на базе транзистора VT11 возрастёт — светодиод EL1 загорится, подсвечивая поверхность под фототранзистором VT1 — датчиком движения робота.
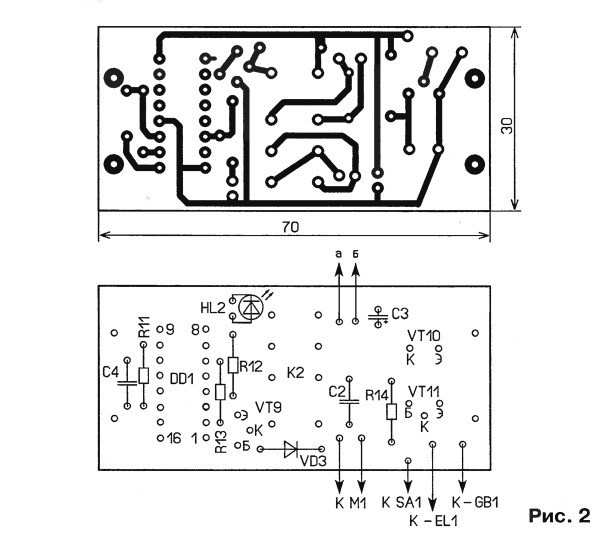
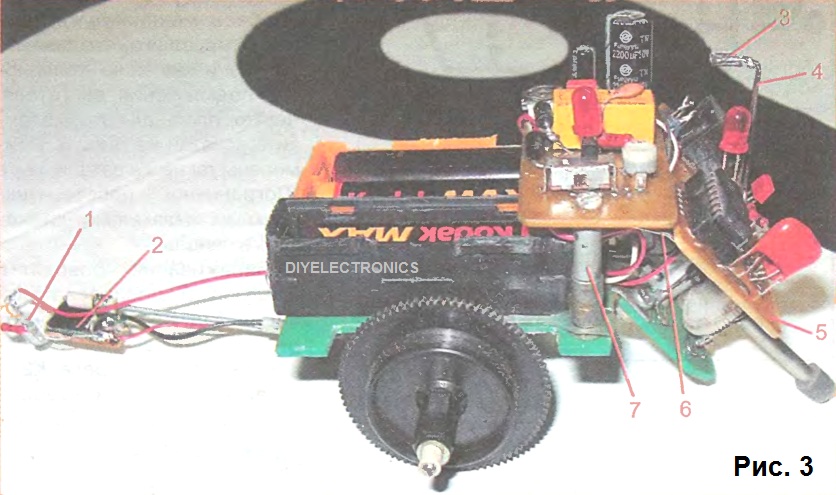
Дополнительные элементы были смонтированы на макетной печатной плате размерами 30×70 мм с применением проводного монтажа (чертёж варианта односторонней печатной платы показан на рис. 2). Внешний вид модернизированного робота показан на рис. 3. Дополнительную плату 5 крепят к стойке 7 с помощью винтов и двух скоб 6 (вторую на этом рисунке не видно), изготовленных из канцелярских скрепок.
Фототранзистор 3 (VT10) крепят на стойке 4 высотой 30…40 мм, изготовленной также из скрепки. Светодиод 1 (EL1) закреплён на плате 2 датчика с помощью резистора R15. Выводы двигателя отпаивают от основной платы и припаивают их к дополнительной в соответствии с рис. 1.
Если «Пограничный» робот изготовлен в варианте без применения реле (рис. 1 и рис. 3 в указанной выше статье), для его доработки потребуется ещё одна микросхема (рис. 4).
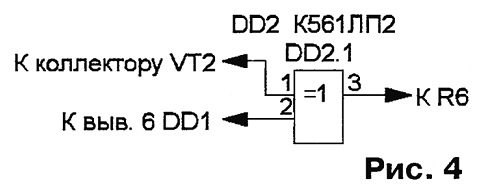
При этом элементы R13, VT9, VD3 и К2 не устанавливают, а неиспользуемые входы микросхемы DD2 соединяют с минусовой линией питания. С ней же соединяют вывод 7 этой микросхемы, а её вывод 14 — с плюсовой линией питания. В таком режиме элемент DD2.1 работает как управляемый таймером инвертор сигнала датчика движения робота. При одном логическом уровне на выходе таймера он пропускает сигнал на вход усилителя мощности без изменения, а в другом инвертирует его, что эквивалентно изменению полярности подключения двигателя. Чертёж платы для этого варианта показан на рис. 5. Применены такие же детали, как в «Пограничном» роботе, микросхемы желательно установить в панель.

Налаживание робота
Налаживание проводят в следующей последовательности. Сначала настраивают «ночное зрение», для чего отключают питание реле К2 и отпаивают один из выводов фототранзистора VT10 и двигателя. Изгибая выводы резистора R15, светодиод EL1 ориентируют так, чтобы центр отражённого от светлой поверхности луча попадал на фототранзистор VT1. Это можно сделать, установив робот на край зеркала, и снизу смотреть на плату фотодатчика. Затем подключают фототранзистор, двигатель и запускают робота без внешней подсветки. Осветительный светодиод должен включиться, а робот — идти по границе линии. Для увеличения яркости осветительного светодиода можно уменьшить сопротивление резистора R15 до 30 Ом. При включении внешнего освещения этот светодиод должен погаснуть, а робот — продолжить движение.
Если светодиод HL2 включается и выключается с интервалом около 15 с, можно подать питание на реле К2 и проверить работоспособность робота. Период переключений можно изменить подборкой конденсатора С4, резистора R11 или подключая точку соединения резисторов R12 и R13 к другому выходу счётчика DD1. Возможный вариант полигона для испытаний модернизированного робота показан на рис. 6. Ширина дорожек — 40…50 мм, диаметр внутреннего круга — 350 мм, большая ось эллипса — 1000… 1200 мм.

Источник: Радио №5 2013
Автор: Д. МАМИЧЕВ, п. Шаталово Смоленской обл.
| C этой схемой также часто просматривают: |
 Сетевой блок питания трансивера - своими руками! Сетевой блок питания трансивера - своими руками!
ТЕЛЕПЕРЕДАТЧИК СВОИМИ СИЛАМИ
ЛЮСТРА ЧИЖЕВСКОГО - СВОИМИ РУКАМИ
СЕРЕБРЯНАЯ ВОДА - СВОИМИ РУКАМИ
Импульсный транcформатор для стробоскопа своими руками.
«Пограничный» робот
Миллиомметр. Приставка к цифровому мультиметру
Индикатор стереобаланса
Переходник для подключения к USB-порту устройства с большим потребляемым током
|  |
Двухкомандное дистанционное радиоуправление Реле времени для электромеханических игрушек «Цифровой» передатчик повышенной мощности «Пограничный» робот ДИСКРЕТНО-ПРОПОРЦИОНАЛЬНОЕ УПРАВЛЕНИЕ АППАРАТУРА ПРОПОРЦИОНАЛЬНОГО УПРАВЛЕНИЯ ПЕРЕДАТЧИК ДЛЯ ТЕЛЕУПРАВЛЕНИЯ Многокомандная система телеуправления ДЕСЯТЬ КОМАНД ПО ДВУМ ПРОВОДАМ Дешифратор простой системы телеуправления |
